
Βασική δομή
ενός βηματικού κινητήρα
Ένας βηματικός κινητήρας είναι ένας κινητήρας συνεχούς ρεύματος που
ελέγχεται από μια σειρά ζευγών από ηλεκτρομαγνητικά πηνία.
Το βασικό τους χαρακτηριστικό είναι ότι μπορούν να κινηθούν με πολύ μεγάλη ακρίβεια σε συγκεκριμένες γωνίες όπως επίσης να κρατούν τη ροπή συγκράτησης υπό μηδενική ταχύτητα.
Ο άξονας του κινητήρα έχει μια σειρά από μαγνήτες που είναι στερεωμένοι σε αυτόν.
Στο στάτη βρίσκονται τα τυλίγματα (μονά ή διπλά) τα οποία αποτελούν τους πόλους του κινητήρα
Για να κινηθεί ο ρότορας εφαρμόζεται διαδοχικά με τη μορφή παλμών σε κάθε ένα από τα παραπάνω ζεύγη μια τάση ηλεκτρικού ρεύματος.
Κάθε παλμός περιστρέφει τον άξονα κατά μια συγκεκριμένη γωνία.
Παρέχοντας συγκεκριμένο αριθμό παλμών στον κινητήρα, έχει σαν αποτέλεσμα την περιστροφή, σε μια καθορισμένη γωνία, του άξονα του κινητήρα.
Κάθε φορά που σε ένα τύλιγμα εφαρμόζεται τάση, ένας πόλος μαγνητίζεται, δημιουργείται μαγνητικό πεδίο, το οποίο απωθεί ή έλκει τους μαγνήτες του ρότορα , προκαλώντας τον κινητήρα να περιστρέφεται.
Ανάλογα τη φορά της περιέλιξης (αριστερόστροφη ή δεξιόστροφη) ο πόλος γίνεται βόρειος ή νότιος.Υπάρχουν βηματικοί κινητήρες 2, 3, 4 ζευγών πόλων.
Όταν το ηλεκτρικό ρεύμα μεταφέρεται από το ένα ζεύγος ηλεκτρομαγνητών στο διπλανό του, ο ρότορας μετατοπίζεται κατά κάποιες μοίρες λόγω των μαγνητικών δυνάμεων που εφαρμόζονται σε αυτόν. Η γωνία αυτή ονομάζεται βήμα του κινητήρα.
































Το βασικό τους χαρακτηριστικό είναι ότι μπορούν να κινηθούν με πολύ μεγάλη ακρίβεια σε συγκεκριμένες γωνίες όπως επίσης να κρατούν τη ροπή συγκράτησης υπό μηδενική ταχύτητα.
Ο άξονας του κινητήρα έχει μια σειρά από μαγνήτες που είναι στερεωμένοι σε αυτόν.
Στο στάτη βρίσκονται τα τυλίγματα (μονά ή διπλά) τα οποία αποτελούν τους πόλους του κινητήρα
Για να κινηθεί ο ρότορας εφαρμόζεται διαδοχικά με τη μορφή παλμών σε κάθε ένα από τα παραπάνω ζεύγη μια τάση ηλεκτρικού ρεύματος.
Κάθε παλμός περιστρέφει τον άξονα κατά μια συγκεκριμένη γωνία.
Παρέχοντας συγκεκριμένο αριθμό παλμών στον κινητήρα, έχει σαν αποτέλεσμα την περιστροφή, σε μια καθορισμένη γωνία, του άξονα του κινητήρα.
Κάθε φορά που σε ένα τύλιγμα εφαρμόζεται τάση, ένας πόλος μαγνητίζεται, δημιουργείται μαγνητικό πεδίο, το οποίο απωθεί ή έλκει τους μαγνήτες του ρότορα , προκαλώντας τον κινητήρα να περιστρέφεται.
Ανάλογα τη φορά της περιέλιξης (αριστερόστροφη ή δεξιόστροφη) ο πόλος γίνεται βόρειος ή νότιος.Υπάρχουν βηματικοί κινητήρες 2, 3, 4 ζευγών πόλων.
Όταν το ηλεκτρικό ρεύμα μεταφέρεται από το ένα ζεύγος ηλεκτρομαγνητών στο διπλανό του, ο ρότορας μετατοπίζεται κατά κάποιες μοίρες λόγω των μαγνητικών δυνάμεων που εφαρμόζονται σε αυτόν. Η γωνία αυτή ονομάζεται βήμα του κινητήρα.



Γενικά οι βηματικοί κινητήρες
κατασκευάζονται με
συγκεκριμένα όρια στα βήματα που μπορούν να κάνουν σε μία πλήρη περιστροφή, συνήθως αυτά είναι 12, 24, 72, 144, 180 και 200
οπότε το κάθε βήμα αντιλαμβανόμαστε ότι αντιστοιχεί σε συγκεκριμένες μοίρες οι
οποίες είναι αντίστοιχα 30, 15, 5, 2.5, 2, και 1.8.
Η τροφοδοσία που δέχονται είναι συνήθως μεγαλύτερη από αυτή που μπορεί να τους δώσει ένας μικροελεγκτής, δίνεται από τον κατασκευαστή και είναι συνήθως 5V, 9V, 12V, και 24V.
Την παραπάνω τροφοδοσία αναλαμβάνουν ειδικά κυκλώματα και οδηγοί ελέγχου βηματικών κινητήρων (μικροεπεξεργαστή ή μικροελεγκτή).
Η τροφοδοσία που δέχονται είναι συνήθως μεγαλύτερη από αυτή που μπορεί να τους δώσει ένας μικροελεγκτής, δίνεται από τον κατασκευαστή και είναι συνήθως 5V, 9V, 12V, και 24V.
Την παραπάνω τροφοδοσία αναλαμβάνουν ειδικά κυκλώματα και οδηγοί ελέγχου βηματικών κινητήρων (μικροεπεξεργαστή ή μικροελεγκτή).

Ας δούμε τη
λειτουργία ενός βηματικού κινητήρα στην πιο απλή του μορφή
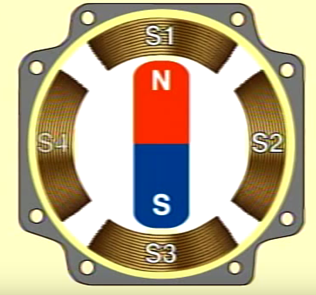
Ο παρακάτω κινητήρας έχει στον ρότορα ένα μόνιμο μαγνήτη με βόρειο και νότιο πόλο. Στο στάτη έχει 4 τυλίγματα S1,S2,S3,S4.
Ο παρακάτω κινητήρας έχει στον ρότορα ένα μόνιμο μαγνήτη με βόρειο και νότιο πόλο. Στο στάτη έχει 4 τυλίγματα S1,S2,S3,S4.
Τροδοδοτείται το τύλιγμα S1 με
συνεχές ρεύμα κατάλληλης φοράς: Το τύλιγμα S1 γίνεται ηλεκτρομαγνήτης με βόρειο και νότιο
πόλο, όπως στο παρακάτω σχήμα. Ο νότιος πόλος του πηνίου έλκει τον βόρειο πόλο
του μαγνήτη.
Στη συνέχεια κόβεται το ρεύμα
από το S1 και
τροδοδοτείται το τύλιγμα S2 με συνεχές ρεύμα κατάλληλης φοράς: Το τύλιγμα S2 γίνεται
ηλεκτρομαγνήτης με βόρειο και νότιο πόλο, όπως στο παρακάτω σχήμα. Ο νότιος
πόλος του πηνίου έλκει τον βόρειο πόλο του μαγνήτη και ο ρότορας περιστρέφεται
κατά 90ο.

Στη συνέχεια κόβεται το ρεύμα
από το S2 και
τροδοδοτείται το τύλιγμα S3 με συνεχές ρεύμα κατάλληλης φοράς: Το τύλιγμα S3 γίνεται
ηλεκτρομαγνήτης με βόρειο και νότιο πόλο, όπως στο παρακάτω σχήμα. Ο νότιος
πόλος του πηνίου έλκει τον βόρειο πόλο του μαγνήτη και ο ρότορας περιστρέφεται
άλλες 90ο.

Στη συνέχεια κόβεται το ρεύμα
από το S3 και
τροδοδοτείται το τύλιγμα S4 με συνεχές ρεύμα κατάλληλης φοράς: Το τύλιγμα S4 γίνεται
ηλεκτρομαγνήτης με βόρειο και νότιο πόλο, όπως στο παρακάτω σχήμα. Ο νότιος
πόλος του πηνίου έλκει τον βόρειο πόλο του μαγνήτη και ο ρότορας περιστρέφεται
άλλες 90ο.

Στη συνέχεια κόβεται το ρεύμα
από το S4 και
τροδοδοτείται πάλι το τύλιγμα S1 με συνεχές ρεύμα κατάλληλης φοράς: Το τύλιγμα S1 γίνεται
ηλεκτρομαγνήτης με βόρειο και νότιο πόλο, όπως στο παρακάτω σχήμα. Ο νότιος
πόλος του πηνίου έλκει τον βόρειο πόλο του μαγνήτη και ο ρότορας περιστρέφεται
άλλες 90ο. Ο κινητήρας έχει κάνει μια πλήρη περιστροφή σε 4 βήματα των 90ο
Το κύκλωμα
οδήγησης του παραπάνω κινητήρα αποτελείται από 4
διακόπτες (τρανζίστορ) που δίνουν ή κόβουν εναλλάξ το ρεύμα στα 4 τυλίγματα του
στάτη.

Ανάλογα
με την κατασκευή του δρομέα διακρίνουμε τα παρακάτω είδη βηματικών κινητήρων:
1)
Βηματικός κινητήρας μόνιμου μαγνήτη-permanent magnet stepping motor (ΡΜ)
Σε αυτούς ο ρότορας
είναι συμπαγής κύλινδρος με τμήματα μόνιμων μαγνητών σε εναλλαγή. Δηλαδή μια
συστοιχία 2,4,6 ή 8 πόλων με εναλλαγή (βόρειος-νότιος).
Έτσι η περιστροφή του
ρότορα επιτυγχάνεται με την εναλλαγή του ρεύματος στα τυλίγματα του στάτη,
αλλάζοντας δηλαδή τη φορά του μαγνητικού πεδίου

2) Βηματικός
κινητήρας μεταβλητής μαγνητικής αντίστασης-Variable reluctance stepper motor (VR)
Αυτοί κατασκευάζονται με ένα τμήμα δρομέα ή με πολλαπλά τμήματα δρομέα, προσαρμοσμένα στην ίδια άτρακτο, με το βόρειο και νότιο πόλο να εναλλάσονται.
Αυτοί κατασκευάζονται με ένα τμήμα δρομέα ή με πολλαπλά τμήματα δρομέα, προσαρμοσμένα στην ίδια άτρακτο, με το βόρειο και νότιο πόλο να εναλλάσονται.

3) Υβριδικός
βηματικός κινητήρας-Hybrid
stepping motor (HB)
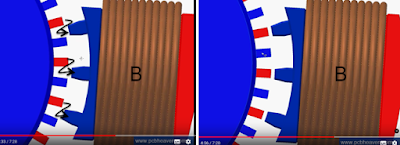
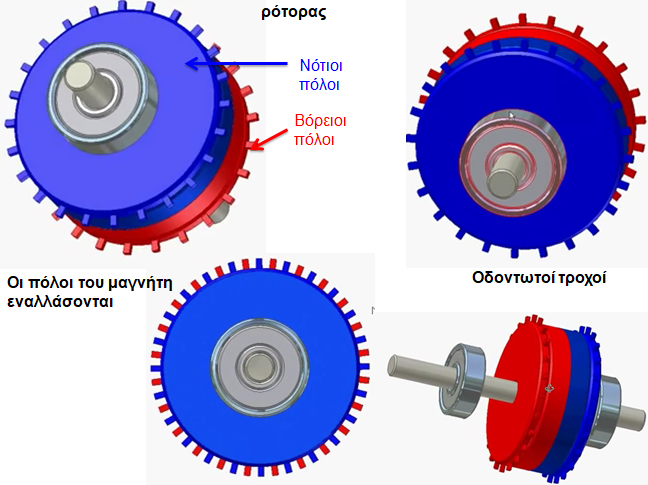
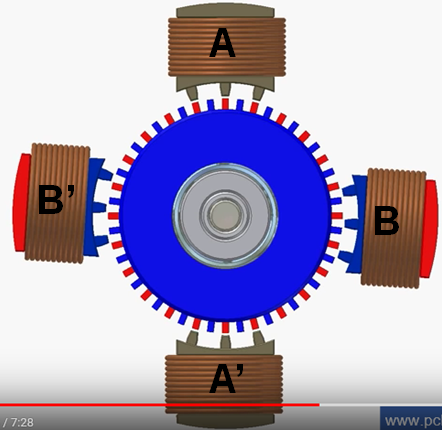
Και σε αυτούς ο δρομέας αποτελείται από μόνιμους μαγνήτες σε μορφή κυλίνδρου. Στα άκρα των μαγνητών προσαρμόζονται τμήματα με τη μορφή οδοντοτών τροχών. Λόγω του ενδιάμεσου μαγνήτη αυτά μετατρέπονται σε βόρειο και νότιο πόλο.
Ο άξονας βρίσκεται στερεωμένος σε ένα κεντρικό γρανάζι, οπότε οι ηλεκτρομαγνητικές δυνάμεις που εξασκούνται στα «δόντια» του γραναζιού (τα οποία αποτελούνται από μαγνητικό βόρειο και νότιο πόλο), το περιστρέφουν και κατά συνέπεια περιστρέφεται και ο άξονας.
Και σε αυτούς ο δρομέας αποτελείται από μόνιμους μαγνήτες σε μορφή κυλίνδρου. Στα άκρα των μαγνητών προσαρμόζονται τμήματα με τη μορφή οδοντοτών τροχών. Λόγω του ενδιάμεσου μαγνήτη αυτά μετατρέπονται σε βόρειο και νότιο πόλο.
Ο άξονας βρίσκεται στερεωμένος σε ένα κεντρικό γρανάζι, οπότε οι ηλεκτρομαγνητικές δυνάμεις που εξασκούνται στα «δόντια» του γραναζιού (τα οποία αποτελούνται από μαγνητικό βόρειο και νότιο πόλο), το περιστρέφουν και κατά συνέπεια περιστρέφεται και ο άξονας.







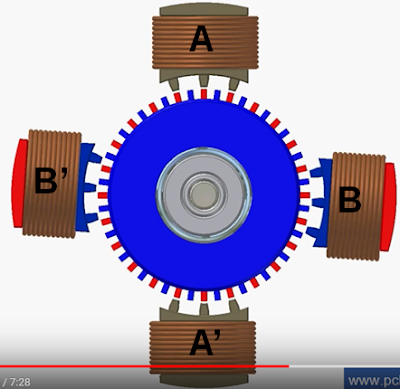
Ας δούμε τη
λειτουργία ενός τέτοιου υβριδικού βηματικού κινητήρα
Ας θεωρήσουμε ένα βηματικό κινητήρα με 4 μονά τυλίγματα Α,Α’,Β,Β’ που θα ενεργοποιούνται ανά δύο.Τα Α-Α’ μαζί και Β-Β’ μαζί.
Ο ρότορας έχει 48 δόντια και τα βήματα αυτού του κινητήρα είναι 96 .
Ας θεωρήσουμε ένα βηματικό κινητήρα με 4 μονά τυλίγματα Α,Α’,Β,Β’ που θα ενεργοποιούνται ανά δύο.Τα Α-Α’ μαζί και Β-Β’ μαζί.
Ο ρότορας έχει 48 δόντια και τα βήματα αυτού του κινητήρα είναι 96 .

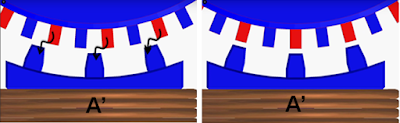
Ας θεωρήσουμε σαν αρχική
θέση του κινητήρα αυτή του παρακάτω σχήματος και ας θεωρήσουμε ότι
ενεργοποιούνται τα πηνία Α και Α’ δημιουργώντας στα άκρα τους Νότιο πόλο (μπλε)
και Βόρειο πόλο (κόκκινο).

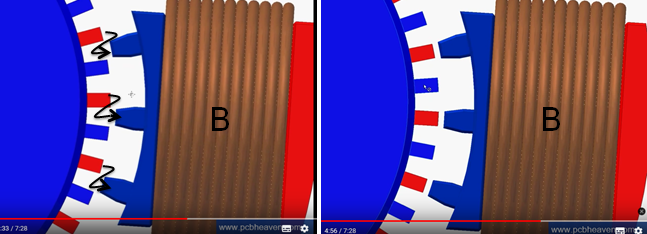
Οι νότιοι πόλοι του
πηνίου Α θα έλξουν τους βόρειους πόλους του ρότορα (κόκκινα δόντια), μέχρι να
ευθυγραμιστούν, αναγκάζοντας το ρότορα να περιστραφεί προς τα δεξιά κατά 1 βήμα.

Το ίδιο ακριβώς θα
συμβεί και με το πηνίο Α’
Ο κινητήρας έχει έρθει
σε αυτή τη θέση

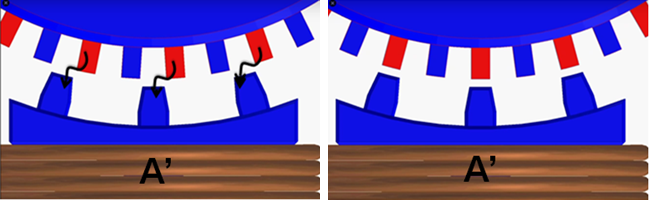
Στο επόμενο στάδιο
απενεργοποιούνται τα Α και Α’ και ενεργοποιούνται τα πηνία Β και Β’
δημιουργώντας στα άκρα τους Νότιο πόλο (μπλε) και Βόρειο πόλο (κόκκινο)
Οι νότιοι πόλοι του
πηνίου Β θα έλξουν τους βόρειους πόλους του ρότορα (κόκκινα δόντια), μέχρι να
ευθυγραμιστούν, αναγκάζοντας το ρότορα να περιστραφεί προς τα δεξιά κατά ακόμα
1 βήμα
Το ίδιο ακριβώς θα
συμβεί και με το πηνίο Β’

Ο κινητήρας θα έρθει σε
αυτή τη θέση

Στο επόμενο στάδιο
απενεργοποιούνται τα Β και Β’ και ενεργοποιούνται τα πηνία Α και Α’ , αλλά με
αντίθετη πολικότητα,
δημιουργώντας στα άκρα τους Νότιο πόλο (μπλε) και Βόρειο πόλο (κόκκινο)
αντίθετης πολικότητας από την προηγούμενη φορά που ενεργοποιήθηκαν.

Οι βόρειοι πόλοι του
πηνίου Α θα έλξουν τους νότιους πόλους του ρότορα (μπλε δόντια), μέχρι να
ευθυγραμμιστούν, αναγκάζοντας το ρότορα να περιστραφεί προς τα δεξιά κατά ακόμα
1 βήμα.

Το ίδιο ακριβώς θα
συμβεί και με το πηνίο Α’

Ο κινητήρας έρχεται σε
αυτή τη θέση

Στο επόμενο στάδιο
απενεργοποιούνται τα Α και Α’ και ενεργοποιούνται τα πηνία Β και Β’ , αλλά με
αλλαγή πολικότητας,
δημιουργώντας στα άκρα τους Νότιο πόλο (μπλε) και Βόρειο πόλο (κόκκινο)
αντίθετης πολικότητας από την προηγούμενη φορά που ενεργοποιήθηκαν.

Οι βόρειοι πόλοι του
πηνίου Β θα έλξουν τους νότιους πόλους του ρότορα (μπλε δόντια), μέχρι να
ευθυγραμμιστούν, αναγκάζοντας το ρότορα να περιστραφεί προς τα δεξιά κατά ακόμα
1 βήμα.

Το ίδιο θα συμβεί και με
το πηνίο Β’

Ο κινητήρας έρχεται σε
αυτή τη θέση. Η διαδικασία αυτή μπορεί να συνεχίζεται για 96 βήματα των 3,75
μοιρών.
Πλεονεκτήματα
βηματικού κινητήρα
•Σε αντίθεση με τους κινητήρες συνεχούς ρεύματος, δεν χρειάζεται φρένα για να μένει ακίνητος ή για να επιβραδυνθεί.
•Στις μικρές ταχύτητες περιστροφής, αλλά και κατά την εκκίνησή του, παράγει μεγάλες τιμές ροπής.
•Είναι πολύ αξιόπιστος καθώς για τη λειτουργία του δεν απαιτούνται κινούμενες ηλεκτρικές επαφές, όπως στον κινητήρα συνεχούς ρεύματος και έτσι η διάρκεια ζωής του εξαρτάται μόνο από την αξιοπιστία του εδράνου κύλισης.
•Δεν απαιτείται χρήση αισθητήρων και κυκλωμάτων ανάδρασης για τον προσδιορισμό της θέσης του άξονα κίνησης.
•Ο βηματικός κινητήρας μπορεί να επιτύχει μεγάλο εύρος ταχυτήτων περιστροφής.
•Ο βηματικός κινητήρας μπορεί να επιτύχει πολύ χαμηλές ταχύτητες περιστροφής
•Σε αντίθεση με τους κινητήρες συνεχούς ρεύματος, δεν χρειάζεται φρένα για να μένει ακίνητος ή για να επιβραδυνθεί.
•Στις μικρές ταχύτητες περιστροφής, αλλά και κατά την εκκίνησή του, παράγει μεγάλες τιμές ροπής.
•Είναι πολύ αξιόπιστος καθώς για τη λειτουργία του δεν απαιτούνται κινούμενες ηλεκτρικές επαφές, όπως στον κινητήρα συνεχούς ρεύματος και έτσι η διάρκεια ζωής του εξαρτάται μόνο από την αξιοπιστία του εδράνου κύλισης.
•Δεν απαιτείται χρήση αισθητήρων και κυκλωμάτων ανάδρασης για τον προσδιορισμό της θέσης του άξονα κίνησης.
•Ο βηματικός κινητήρας μπορεί να επιτύχει μεγάλο εύρος ταχυτήτων περιστροφής.
•Ο βηματικός κινητήρας μπορεί να επιτύχει πολύ χαμηλές ταχύτητες περιστροφής
Μειονεκτήματα
βηματικού κινητήρα
•Θορυβώδης λειτουργία.
•Αδυναμία περιστροφής σε υψηλές ταχύτητες.
•Κατά τη μετακίνηση φορτίων μεγάλης μάζας μπορεί να μη σταματήσει ακαριαία ο κινητήρας, λόγω της αυξημένης αδράνειας.
•Θορυβώδης λειτουργία.
•Αδυναμία περιστροφής σε υψηλές ταχύτητες.
•Κατά τη μετακίνηση φορτίων μεγάλης μάζας μπορεί να μη σταματήσει ακαριαία ο κινητήρας, λόγω της αυξημένης αδράνειας.