

Πλεονεκτήματα της χρήσης μόνιμων μαγνητών
στης κατασκευή ηλεκτρικών μηχανών
Οι
πρώτες εφαρμογές μηχανών μόνιμου μαγνήτη μπορούν να χρονολογηθούν από τα μέσα
του 19ου αιώνα. Όμως, η χρήση χαμηλής ποιότητας μαγνητικών υλικών αλλά και η
ύπαρξη τεχνολογιών ηλεκτρομαγνητικής διέγερσης τις κατέστησε μη εμπορικά
βιώσιμες και αποθάρρυνε την ανάπτυξη και χρήση τους για πολλά χρόνια.
H
ανάπτυξη μόνιμων μαγνητών υψηλής ενέργειας αλλά και η ραγδαία πρόοδος στον
τομέα των ηλεκτρονικών ισχύος και ελέγχου, κατέστησε τις μηχανές μόνιμου
μαγνήτη ως μια ελκυστικότερη εναλλακτική από τις μηχανές με ηλεκτρομαγνητική
διέγερση και σε πολλές εφαρμογές τις αντικατέστησε εξ ολοκλήρου.
Η
χρήση μόνιμων μαγνητών στην κατασκευή ηλεκτρικών μηχανών έχει τα παρακάτω
πλεονεκτήματα:
· Υψηλότερη ροπή και ισχύ εξόδου ανά όγκο.
· Καλύτερη δυναμική συμπεριφορά (υψηλότερη
πυκνότητα μαγνητικής ροής στο διάκενο).
· Μείωση των απωλειών και αυξημένη απόδοση,
καθώς δεν υπάρχουν απώλειες διεγέρσεως.
· Απλοποίηση της κατασκευής και ευκολότερη
συντήρηση.
· Αθόρυβη λειτουργία.
· Μεγαλύτερο προσδόκιμο ζωής.
· Μεγαλύτερο εύρος ταχυτήτων.
ΣΥΓΧΡΟΝΟΣ
ΚΙΝΗΤΗΡΑΣ ΜΟΝΙΜΟΥ ΜΑΓΝΗΤΗ
Εισαγωγή
Οι
ηλεκτρικοί κινητήρες έχουν τεράστιο μερίδιο στην παγκόσμια αγορά, με
περισσότερους από 5 δισεκατομμύρια να κατασκευάζονται κάθε χρόνο. Λόγω της
αυξανόμενης ζήτησης για συμπαγείς και αξιόπιστους κινητήρες και λόγω της
εξέλιξης νέων τεχνολογιών ημιαγωγικών στοιχείων και μόνιμων μαγνητών υψηλής
απόδοσης και χαμηλού κόστους, οι σύγχρονοι κινητήρες μόνιμου μαγνήτη αποτελούν
μια δημοφιλή λύση για πληθώρα εφαρμογών.
Στάτης
Ο
στάτης ενός σύγχρονου κινητήρα μονίμου μαγνήτη, είναι κατασκευασμένος από
στοιβαγμένα ελάσματα σιλικονούχου χάλυβα (silicon steel) πάχους 0,3-0,5 mm.
Μεταξύ από κάθε στρώση ελασμάτων παρεμβάλλεται ειδική μονωτική ρητίνη. Σκοπός
της ρητίνης, είναι η αύξηση της αντίστασης αγωγής μεταξύ των στρώσεων του
χάλυβα και συνεπώς, ελαχιστοποίηση των δινορευμάτων. Τα τυλίγματα του στάτη
τοποθετούνται σε αξονικές τομές στην εσωτερική περιφέρεια, με κάθε ένα από αυτά
να κατασκευάζεται με την διασύνδεση μεγάλου αριθμού ελιγμάτων χαλκού. Συνήθως,
ο στάτης μοιάζει με εκείνον του κινητήρα επαγωγής. Όμως, τα τυλίγματα του
διανέμονται με διαφορετικό τρόπο. Οι περισσότεροι κινητήρες ΒLDC διαθέτουν τρία
τυλίγματα στο στάτη σε συνδεσμολογία αστέρα.

Υπάρχουν
δύο βασικές μορφολογίες στάτη:
Στάτης με αυλακώσεις·
Στάτης χωρίς αυλακώσεις·
Ο
στάτης με αυλακώσεις έχει κατασκευαστικά μικρό μαγνητικό διάκενο, με αποτέλεσμα
ο συντελεστής διαπερατότητας και η πυκνότητα μαγνητικής ροής του διακένου να
είναι αυξημένοι. Αυτό συνεπάγεται μεγαλύτερη παραγόμενη ροπή και αυξημένη
απόδοση. Επίσης, η μεγάλη επιφάνεια επαφής μεταξύ των τυλιγμάτων και του στάτη
προσφέρει καλή απαγωγή θερμότητας από τα τυλίγματα προς το περιβάλλον. Βασικά
μειονεκτήματα αυτής της μορφολογίας είναι η ανάπτυξη ταλαντώσεων στην
παραγόμενη ροπή λόγω της μη ομοιογενούς κατανομής της μαγνητικής διαπερατότητας
του διακένου (ροπή αντιδράσεως) και το αυξημένο κόστος, που υπεισέρχεται από τη
δυσκολία εισαγωγής των τυλιγμάτων στις αυλακώσεις.
Προκειμένου
να αντιμετωπισθεί το πρόβλημα της ροπής αντιδράσεως αναπτύχθηκε η μορφολογία
στάτη με αυλακώσεις του Σχήματος 2c. Αυτή η δομή, έχει αυλακώσεις χωρίς
ανοίγματα, με τα πέλματα των δοντιών του στάτη να ενώνονται σχηματίζοντας μια
λεία επιφάνεια. Αυτή η ομοιογένεια του διακένου εξασφαλίζει πολύ μικρές αλλαγές
στην μαγνητική αντίσταση διακένου που συναντάει ο μαγνήτης ενώ περιστρέφεται,
μειώνοντας την ροπή αντιδράσεως. Οι ενώσεις των αυλακώσεων υστερούν από πλευράς
μαγνητικής απόδοσης, καθώς αυξάνουν τη ροή σκεδάσεως και στερούν ένα τμήμα της
μαγνητικής ροής των μαγνητών από τα τυλίγματα. Αυτό έχει ως αποτέλεσμα παραγωγή
χαμηλότερης τάσης εξ επαγωγής και κατ’ επέκταση μειωμένη απόδοση.
Στον
στάτη χωρίς αυλακώσεις, (Σχήμα 2b), τα τυλίγματα παίρνουν την μορφή
δακτυλιδιού και τοποθετούνται στην εσωτερική επιφάνεια του στάτη. Αυτή η
μορφολογία εμφανίζει μηδενική ροπή αντιδράσεως, καθώς η επιφάνεια του στάτη
είναι λεία με τη μαγνητική αντίσταση που συναντούν οι μαγνήτες να μην
μεταβάλλεται κατά την περιστροφή του δρομέα. Ένα ακόμα πλεονέκτημα αυτής της
μορφολογίας, είναι η ύπαρξη αυξημένου χώρου για την εισαγωγή τυλίγματος.
Ωστόσο, η μειωμένη δυνατότητα απαγωγής θερμότητας από τα τυλίγματα προς το
στάτη, μειώνει τις επιτρεπόμενες τιμές ρευμάτων λειτουργίας. Το μαγνητικό
διάκενο αποτελείται από το διάκενο αέρα μαζί με το πάχος των τυλιγμάτων. Αυτή η
αύξηση στις διαστάσεις του διακένου προκαλεί μείωση στον συντελεστή
διαπερατότητας και στην πυκνότητα μαγνητικής ροής του διακένου. Αυτό έχει ως
άμεσο αποτέλεσμα τη μείωση της παραγόμενης ροπής και κατ’ επέκταση μειωμένη
απόδοση.

Δρομέας
Ο
δρομέας είναι συνήθως κατασκευασμένος από ελασματοποιημένο σιλικονούχο χάλυβα
κυλινδρικής μορφής. Στην επιφάνειά του τοποθετούνται οι μόνιμοι μαγνήτες, οι
οποίοι σχηματίζουν ζεύγη πόλων αντίθετης πολικότητας.
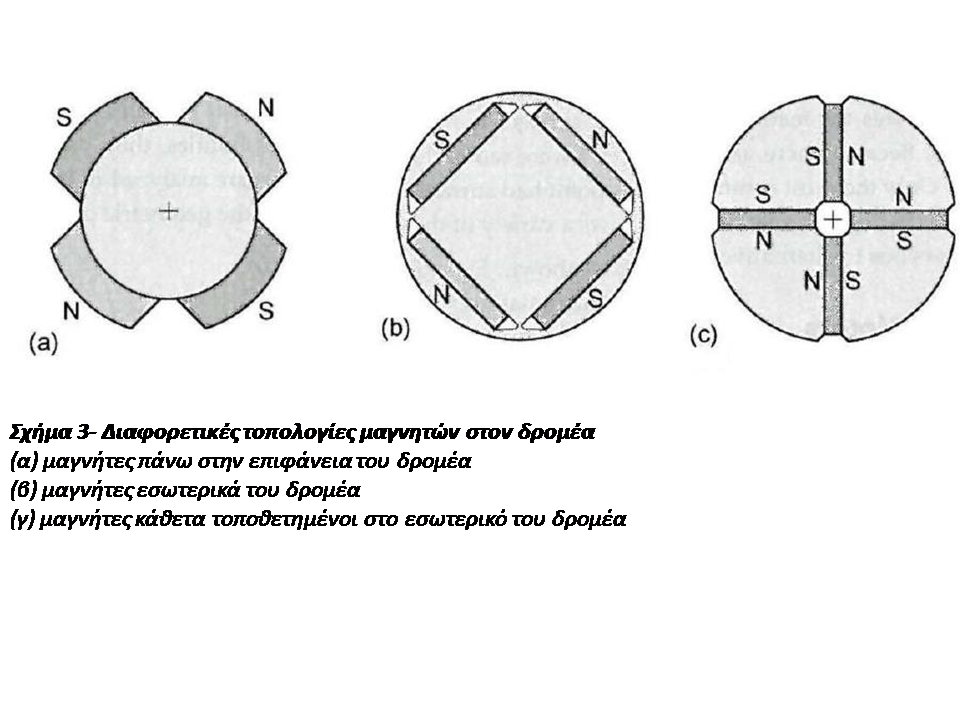
Ανάλογα
με το σχήμα και την τοποθέτηση των μαγνητών υπάρχουν οι εξής τοπολογίες δρομέα:
α)
δρομέας με μαγνήτες συγκολλημένους στην επιφάνειά του,
β)
δρομέας με μαγνήτες στο εσωτερικό του
γ) δρομέας με μαγνήτες κάθετα
τοποθετημένους στο εσωτερικό του.
Με
βάση την απαιτούμενη πυκνότητα μαγνητικού πεδίου γίνεται επιλογή του κατάλληλου
μαγνητικού υλικού για την κατασκευή τους. Στο παρελθόν το πιο συνηθισμένο υλικό
για την κατασκευή μόνιμων μαγνητών ήταν οι κεραμικοί μαγνήτες (φερρίτες). Όμως,
με την πρόοδο της τεχνολογίας άρχισαν να χρησιμοποιούνται νέες τεχνολογίες
μαγνητών υψηλής ενέργειας, όπως κράματα σπάνιων γαιών (NdSmCo και NdFeB). Ο
δρομέας μπορεί να τοποθετηθεί εσωτερικά ή εξωτερικά του στάτη της μηχανής.
Γενικά όμως, κατασκευαστικά προτιμώνται οι μηχανές με εσωτερικό δρομέα, καθώς
με αυτό τον τρόπο τα τυλίγματα του στάτη βρίσκονται πιο κοντά στο εξωτερικό
μέρος της μηχανής αποβάλλοντας ευκολότερα τη θερμότητα στο περιβάλλον.
Τύποι
σύγχρονης μηχανής μόνιμου μαγνήτη
Οι
σύγχρονες μηχανές μόνιμου μαγνήτη ανάλογα με την τεχνική ελέγχου και την μορφή
της επαγόμενης τάσης στα τυλίγματα του στάτη, χωρίζονται σε δύο βασικές
κατηγορίες:
· Μηχανές μόνιμου μαγνήτη τραπεζοειδούς ή
τετραγωνικού παλμού (trapezoidal or square wave permanent magnet machines)-
· Ημιτονοειδείς σύγχρονες μηχανές μόνιμου
μαγνήτη (sinusoidal permanent magnet synchronous machines)
Στις
μηχανές της πρώτης κατηγορίας (Σχήμα 4a), η τροφοδοσία γίνεται με
τετραγωνικούς παλμούς ρεύματος διάρκειας 120ο ηλεκτρικών μοιρών
συγχρονισμένους με την τάση εξ επαγωγής. Οι παλμοί ρεύματος είναι συγχρονισμένοι
με τη τάση εξ επαγωγής, έτσι ώστε το σταθερό τμήμα της τάσης να συμπίπτει με τα
διαστήματα όπου το φασικό ρεύμα διατηρεί σταθερή τιμή. Στις μηχανές αυτής της
κατηγορίας χρησιμοποιούνται αισθητήρες Hall, καθώς είναι απαραίτητη η γνώση της
θέσης του δρομέα μόνο στα σημεία μετάβασης, δηλαδή κάθε 60ο ηλεκτρικές μοίρες.
Η οδήγηση αυτού του τύπου κινητήρων γίνεται με χρήση τριφασικού αντιστροφέα.
Οι
μηχανές της δεύτερης κατηγορίας (Σχήμα 4β) προέκυψαν από την προσπάθεια
κατασκευής μιας σύγχρονης μηχανής χωρίς το τύλιγμα διεγέρσεως. Αυτό έγινε
δυνατό αντικαθιστώντας το τύλιγμα με μόνιμους μαγνήτες ημιτονοειδούς κατανομής
μαγνητικού πεδίου. Oι μηχανές αυτές τροφοδοτούνται με τριφασική ημιτονοειδή
τάση και λειτουργούν υπό την αρχή του στρεφόμενου μαγνητικού πεδίου. Σε
λειτουργία σταθερών στροφών δεν απαιτείται γνώση της ακριβούς θέσης του, καθώς
η μηχανή περιστρέφεται με τον σύγχρονο αριθμό στροφών. Όταν όμως έχουμε
μεταβολή της συχνότητας περιστροφής, απαιτείται ακριβής εποπτεία της θέσης του
δρομέα, ώστε οι τάσεις τροφοδοσίας που θα παραχθούν να συγχρονίζονται με την
τάση εξ επαγωγής και κατ’ επέκταση με την περιστροφή του δρομέα. Η οδήγηση
αυτού του τύπου κινητήρων γίνεται συνήθως με τριφασικό αντιστροφέα.


Αισθητήρες
Ηall-Φαινόμενο Hall
Όταν
ένας ρευματοφόρος αγωγός βρίσκεται μέσα σε ένα μαγνητικό πεδίο, τότε η επαγωγή
Β ασκεί εγκάρσια δύναμη στου φορείς ρεύματος και τους ωθεί στη μια πλευρά του
αγωγού.Το παρακάτω φαινόμενο είναι γνωστό ως φαινόμενο Hall
Ο
αισθητήρας Hall είναι ένας αισθητήρας μαγνητικού πεδίου. Όταν εφαρμόζεται σε
αυτόν μαγνητικό πεδίο έντασης Β και τροφοδοτείται από συνεχές ρεύμα, αναπτύσσει
τάση στους ακροδέκτες του.
Αντίθετα
από έναν κινητήρα συνεχούς ρεύματος με ψήκτρες, η μετάβαση σε έναν κινητήρα
BLDC ελέγχεται ηλεκτρονικά. Για να περιστραφεί ο δρομέας του κινητήρα, τα
τυλίγματα του στάτη πρέπει να τροφοδοτηθούν με μια συγκεκριμένη ακολουθία,
καθώς με αυτό τον τρόπο αποφασίζεται ποιο τύλιγμα θα τροφοδοτηθεί, ώστε να
δημιουργηθεί στρεφόμενο μαγνητικό πεδίο στο εσωτερικό της μηχανής. Προκειμένου
να επιτευχθεί αυτό, είναι απαραίτητο να γνωρίζουμε την ακριβή θέση του
δρομέα ανά πάσα στιγμή. Αυτό γίνεται δυνατό με την τοποθέτηση τριών αισθητήρων
Hall. Οι αισθητήρες συνήθως τοποθετούνται στο στάτη της μηχανής σε διαστήματα
των 60ο ή 120ο μοιρών. Όταν ένας μαγνητικός πόλος περάσει δίπλα από τον
αισθητήρα Hall δημιουργεί ένα υψηλό ή χαμηλό σήμα, ανάλογα με την πολικότητα
του. Με την ανάγνωση και αποκωδικοποίηση του συνδυασμού των τριών σημάτων των
αισθητήρων Hall, καθίσταται δυνατή η επιλογή της κατάλληλης ακολουθίας για την
ηλεκτρονική μετάβαση.
Σε
σπάνιες περιπτώσεις, οι αισθητήρες Hall τοποθετούνται στο σταθερό τμήμα της
μηχανής, ενώ τοποθετούνται επιπρόσθετοι μαγνήτες μικρότερης κλίμακας στον
δρομέα. Οι μαγνήτες αυτοί τοποθετούνται με σκοπό να έχουν ίδια πολικότητα με
τους μόνιμους μαγνήτες του δρομέα, έτσι ώστε, όταν αυτός περιστρέφεται, οι
αισθητήρες hall να δίνουν το κατάλληλο αποτέλεσμα.

Ηλεκτρονική
μεταγωγή – Οδήγηση του κινητήρα ΒLDC
Σε
κάθε μετάβαση της τροφοδοσίας του στάτη απαιτείται να υπάρχει ένα τύλιγμα, από
το οποίο εισέρχεται το ρεύμα, και ένα τύλιγμα, από το οποίο εξέρχεται. Κάθε
τύλιγμα άγει συνεχόμενα για 120ο ηλεκτρικές μοίρες.
Η
ηλεκτρομαγνητική ροπή που εμφανίζεται στον άξονα της μηχανής παράγεται μέσω της
αλληλεπίδρασης των πεδίων του στάτη και του δρομέα. Η ροπή αυτή
μεγιστοποιείται, όταν τα διανύσματα των πεδίων αυτών είναι κάθετα μεταξύ τους
και μειώνεται όσο αυτά τείνουν να γίνουν παράλληλα. Προκειμένου να διατηρείται
αυτή η καθετότητα καθ’ όλη τη διάρκεια της περιστροφής του δρομέα, το μαγνητικό
πεδίο του στάτη πρέπει να περιστρέφεται μαζί με τον δρομέα. Για αυτό το λόγο
υπάρχει μια συγκεκριμένη ακολουθία μεταβάσεων, ώστε το πεδίο του στάτη να
μετακινείται στο διάκενο ανάλογα με την ηλεκτρική γωνία που έχει διανύσει ο
δρομέας. Οι μεταβάσεις λαμβάνουν χώρα κάθε 60ο ηλεκτρικής περιστροφής και κάθε
τύλιγμα άγει συνεχόμενα για 120ο ηλεκτρικές μοίρες, στο πέρας των οποίων
πραγματοποιείται μετάβαση του ρεύματος από την μία φάση στην επόμενη.
Αυτό επαναλαμβάνεται έξι φορές προκειμένου να
ολοκληρωθεί ένας ηλεκτρικός κύκλος. Κάθε αλλαγή της τιμής ενός εκ των σημάτων
Hall πρέπει να μεταφράζεται σε αλλαγή των φάσεων αγωγής από τον τριφασικό
αντιστροφέα, με τρόπο που να διατηρείται η ορθή διαδοχή διέγερσης. Όσο αφορά
την μηχανική περιστροφή του δρομέα, ο αριθμός των ζευγών πόλων του κινητήρα
καθορίζει πόσες φορές μεγαλύτερη είναι η ηλεκτρική γωνία/ταχύτητα από τη
μηχανική.×Για την υλοποίηση του ελέγχου απαιτείται η
γνώση της θέσης του δρομέα σε διακριτές θέσεις 60ο μοιρών. Όπως βλέπουμε στο
παράδειγμα του Σχήματος 6 κάθε 60ο ηλεκτρικές μοίρες περιστροφής, ένας από
τους αισθητήρες Ηall δίνει σήμα
Η
ακριβής σχέση μεταξύ ηλεκτρικής γωνίας και σημάτων Hall του προηγούμενου
παραδείγματος αποτυπώνεται στο Σχήμα 6. Επίσης, παρουσιάζονται οι
κυματομορφές των πολικών τάσεων εξ επαγωγής, του ρεύματος κάθε φάσης και της
ροπής.

Χαρακτηριστική
ροπής-στροφών
Υπάρχουν
δύο βασικές παράμετροι που καθορίζουν την ικανότητα παραγωγής ροπής ενός
κινητήρα BLDC:
η ροπή ονομαστικού φορτίου ΤR και η μέγιστη ροπή φορτίου ΤP.
Σε
εφαρμογές σταθερού φορτίου η μηχανή μπορεί να παράγει συνεχόμενη ροπή με
μέγιστη τιμή την ονομαστική ροπή ΤR. Αν το φορτίο ξεπεράσει την τιμή,
προκειμένου να καλύψει την ροπή φορτίου ο κινητήρας θα αναπτύξει στα τυλίγματά
του τιμές ρεύματος μεγαλύτερες της ονομαστικής, προκαλώντας σε αυτά
υπερθέρμανσή και πιθανώς βλάβες. H παραγόμενη ροπή παραμένει σταθερή, όσο η
ταχύτητα παραμένει μικρότερη της ονομαστικής. Η μηχανή μπορεί να φτάσει την
μέγιστη ταχύτητα περιστροφής (περίπου 150% της ονομαστικής), αλλά αυτό θα
επιφέρει μείωση της παραγόμενης ροπής.
Σε
εφαρμογές όπου υπάρχουν συχνές εκκινήσεις και παύσεις στη λειτουργία της
μηχανής με προσθήκη φορτίου, η μηχανή μπορεί να καλείται να αναπτύξει τιμές ηλεκτρομαγνητικής
ροπής μεγαλύτερες από την ονομαστική. Αυτή η απαίτηση διαρκεί για μικρό χρονικό
διάστημα, και συμβαίνει ιδίως κατά την εκκίνηση και επιτάχυνση του κινητήρα. Η
επιπλέον αυτή ροπή χρειάζεται ώστε να ξεπεραστεί η αδράνεια του φορτίου και του
ίδιου του δρομέα και δεν μπορεί με τίποτα να ξεπεράσει την τιμή ΤP. Γενικά, η
ροπή φορτίου μπορεί να ξεπεράσει την ονομαστική τιμή, υπό την προϋπόθεση όμως
ότι θα είναι για μικρό σχετικά χρονικό διάστημα και η τιμή της θα είναι
μικρότερη από τη τιμή ΤP.

Σύγκριση
σύγχρονου κινητήρα μόνιμου μαγνήτη με άλλους τύπους μηχανών
Στις
μέρες μας, η ραγδαία εξέλιξη της τεχνολογίας, ευνοεί την αντικατάσταση σε
πολλές εφαρμογές των κλασικών κινητήρων συνεχούς ρεύματος και των ασύγχρονων
επαγωγικών κινητήρων με μηχανές νέας τεχνολογίας. Χαρακτηριστικό παράδειγμα,
του νέου αυτού τύπου μηχανών, είναι και η σύγχρονη μηχανή μόνιμου μαγνήτη. Η
ευκολία στον έλεγχο, η απουσία ψηκτρών και των προβλημάτων που αυτές
δημιουργούν, ο μεγάλος βαθμός απόδοσης, καθώς και η υψηλή πυκνότητα ισχύος, την
έχουν καταστήσει μια ελκυστική εναλλακτική για μεγάλο πλήθος εφαρμογών.
Στους παρακάτω δύο Πίνακες ακολουθεί μια σύντομη παρουσίαση των χαρακτηριστικών του κινητήρα
ΒLDC σε σχέση με άλλα είδη κινητήρων.


Σύγκριση κινητήρα μόνιμου μαγνήτη με κινητήρα βραχυκυκλωμένου δρομέα που ελέγχεται από inverter
Είναι γνωστό ότι οι ηλεκτροκινητήρες
καταναλώνουν το 65% της ενέργειας που χρησιμοποιείται στη βιομηχανία, αλλά
είναι λιγότερο γνωστό το γεγονός ότι το 96% του κόστους διάρκειας ζωής
(lifetime cost) ενός ηλεκτροκινητήρα συνδέεται με την κατανάλωση ενέργειας.
Αυτό δείχνει τη σημασία της συνολικής απόδοσης σε σχέση με το αρχικό κόστος
αγοράς, σύμφωνα με τους όρους σπουδαιότητας του συνολικού κόστους ιδιοκτησίας
(TCO-Total Cost of Ownership).
Οι σύγχρονοι κινητήρες μόνιμου μαγνήτη (PMSM-Permanent Magnet Synchronous Motors) πληρούν τις απαιτήσεις
της ταξινόμησης IE4 (Super Premium). Αυτό αποδεικνύεται από τις δυνατότητές
τους για εξοικονόμηση ενέργειας έως και 40% σε σύγκριση με έναν κινητήρα
βραχυκυκλωμένου δρομέα κατηγορίας IE2 που ελέγχεται από inverter. Οι κινητήρες
PMSM έχουν καλύτερη απόδοση σε σύγκριση με τους επαγωγικούς κινητήρες σε
συνθήκες λειτουργίας μερικού φορτίου και εξαιρετικά υψηλή απόδοση σε
ονομαστικές συνθήκες λειτουργίας. Έχουν, επίσης, σημαντικά υψηλότερη πυκνότητα
ισχύος η οποία (για κινητήρες με κιβώτιο ταχυτήτων) εξασφαλίζει υψηλότερη
απόδοση με μειωμένες ανάγκες σε χώρο και όγκο για την εγκατάσταση.
Ο σύγχρονος σχεδιασμός των PMSM τους καθιστά
ανώτερους όχι μόνο σε ότι αφορά τη μετατροπή της ηλεκτρικής ενέργειας σε
μηχανική ισχύ, αλλά και στη δυνατότητα διατήρησης σταθερής ταχύτητας,
ανεξάρτητα από το φορτίο. Αυτό σημαίνει ότι η ταχύτητα του κινητήρα δεν αλλάζει
σε τυχόν μεταβολές του φορτίου ή σε ενδεχόμενο πτώσης τάσεως (τουλάχιστον για
όσο διάστημα η συχνότητα του δικτύου παραμένει σταθερή). Αυτός ο σχεδιασμός,
μειώνει τις απώλειες θερμότητας από τον ρότορα κατά 100%, τις συνολικές
απώλειες κατά περίπου 25% και αυξάνει την συνολική απόδοση κατά 10% ή και
περισσότερο. Για τον πελάτη που εγκαθιστά έναν κινητήρα PMSM, αυτό μεταφράζεται
σε χαμηλότερο συνολικό κόστος ιδιοκτησίας, μείωση των εκπομπών CO2, και διαρκή
εξοικονόμηση ενέργειας. Το χαμηλό κόστος λειτουργίας και συντήρησης των PMSMs
τους καθιστά ιδανικούς για εφαρμογές όπως ανεμιστήρες, αντλίες και
αεροσυμπιεστές, καθώς και για εφαρμογές φορτίου σταθερής ροπής όπως είναι οι
ανελκυστήρες και οι μεταφορικές ταινίες.
Σημειώνεται ότι από τον Ιανουάριο του 2015
και μετά, οι κινητήρες με ονομαστική ισχύ από 7,5 έως 375 kW (και από τον
Ιανουάριο του 2017 και μετά κινητήρες με ονομαστική ισχύ από 0,75 έως 375 kW)
θα πρέπει να ικανοποιούν τις απαιτήσεις της κατηγορία ενεργειακής
αποδοτικότητας IE3 (Premium). Αντίθετα, κινητήρες που ελέγχονται από
μετατροπείς συχνότητας εξαιρούνται από αυτόν τον κανονισμό, και θα πρέπει να
πληρούν το πρότυπο ΙΕ2.
Η βελτιωμένη τεχνολογία και αποδοτικότητα ενός κινητήρα PMSM
συνεπάγεται ένα υψηλότερο αρχικό κόστος αγοράς. Το κόστος αυτό, όμως, ανακτάται
αργότερα κατά τη διάρκεια της λειτουργίας του κινητήρα.
Στη συνέχεια, δίνεται μια σύγκριση, όπου ένας ασύγχρονος
κινητήρας (ASM-Asynchronous Motor) που ελέγχεται από μετατροπέα συχνότητας και
ένας κινητήρας μόνιμου μαγνήτη εκτελούν πανομοιότυπα καθήκοντα. Η σύγκριση
έγινε σε ένα εργοστάσιο επεξεργασίας αποβλήτων στη Γερμανία. Και τα δύο μοτέρ
τροφοδοτούν έναν παχυντικό δίσκο για επτά ώρες κάθε μέρα. Προκειμένου να
εξασφαλιστεί ότι ο ασύγχρονος κινητήρας λειτουργεί υπό βέλτιστη
αποδοτικότητα, χρησιμοποιήθηκε ένας μετατροπέας συχνότητας για την
παρακολούθηση των φορτίων του κινητήρα. Τέλος, προκειμένου να είναι βέβαιο ότι
ενδεχόμενες διαφορές στην απόδοση θα αποδοθούν μόνο στους κινητήρες, τα δύο
συστήματα κίνησης χρησιμοποιούν το ίδιο ακριβώς κιβώτιο ταχυτήτων. Τα
αποτελέσματα της σύγκρισης, φαίνονται στον παρακάτω πίνακα:
Ροπή
(Nm)
|
Ταχύτητα
(RPM)
|
% απόδοση
ενέργειας
|
Κατανάλωση
(kW/hr)
|
Τετραετής κατανάλωση(kW)
|
ASM
|
2,62
|
1350
|
61,5
|
0,26
|
2657
|
PMSM
|
3,50
|
1500
|
87,7
|
0,16
|
1635
|
ASM : Ασύγχρονος Κινητήρας
PMSM : Σύγχρονος κινητήρας Μόνιμης Μαγνήτισης
Η δοκιμή έδειξε ότι ο κινητήρας PMSM εξοικονόμησε 40% ενέργεια
σε σχέση με τον ASM, η οποία για μια περίοδο τεσσάρων ετών μεταφράζεται σε
1022 kW/hr. Δεδομένου ότι πιθανότατα η τιμή της ηλεκτρικής ενέργειας θα
αυξηθεί μέσα σε αυτό το διάστημα, θα αυξηθεί και η πραγματική αξία της
εξοικονόμησης.
πηγές: ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ του φοιτητή Αλκαλάη Βίκτωρα του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών και
http://drivetechgr.blogspot.gr/
http://drivetechgr.blogspot.gr/
Δεν υπάρχουν σχόλια:
Δεν επιτρέπονται νέα σχόλια.